")
")
| Issue |
Rev. Fr. Geotech.
Number 173, 2022
|
|
|---|---|---|
| Article Number | 2 | |
| Number of page(s) | 16 | |
| DOI | https://doi.org/10.1051/geotech/2022015 | |
| Published online | 29 septembre 2022 | |
Article de recherche / Research Article
Impact du creusement au tunnelier sur un pieu : synthèse de l’exercice de prévision TULIP
Impact of tunnelling on a pile: summary of the TULIP benchmark exercise
1
Centre d’Études des Tunnels (CETU), Bron, France
2
Université Gustave Eiffel (UGE), Marne-la-Vallée, France
3
Université de Lyon, ENTPE, LTDS – UMR CNRS 5513, Vaulx-en-Velin, France
4
Société du Grand Paris (SGP), Saint-Denis, France
* Auteur de correspondance : Cette adresse e-mail est protégée contre les robots spammeurs. Vous devez activer le JavaScript pour la visualiser.
Résumé
Un exercice de prévision a été organisé dans le cadre du projet de recherche TULIP (TUnneliers et Limitation des Impacts sur des Pieux) sur la base d’une expérimentation en vraie grandeur originale réalisée sur la ligne 16 du Grand Paris Express. Cet exercice de modélisation a vu une large mobilisation des acteurs des travaux souterrains (bureaux d’études, entreprises, concepteurs de logiciels géotechniques, universitaires) qui ont confronté leurs approches d’estimation des déplacements induits en surface du terrain, du tassement d’un pieu, et des efforts induits dans le pieu par le passage du tunnelier. La synthèse des hypothèses effectuées entre les différents participants révèle tout d’abord une grande diversité d’approches, tant en termes de choix des caractéristiques géotechniques des terrains à données d’entrée constantes, qu’en termes de procédés de modélisation du tunnelier. La synthèse des résultats des différents modèles et leur comparaison aux résultats expérimentaux révèle ensuite une dispersion significative, preuve que l’estimation de l’impact d’un tunnelier sur des fondations profondes reste un sujet ouvert à l’heure actuelle, avec une optimisation possible des projets.
Abstract
A benchmark exercise was organized as part of the TULIP research project (TUnnelling and Limitation of Impacts on Piles) on the basis of an original full-scale experiment carried out on line 16 of the Grand Paris Express. This modeling exercise saw a large mobilization of actors in underground works (design offices, work companies, designers of geotechnical software, academics) who compared their approaches to estimate the displacements induced on the surface of the ground, the settlement of a pile, and the forces induced in the pile by the passage of the tunnel boring machine. The synthesis of the assumptions made by the different participants first reveals a great diversity of approaches, both in terms of the choice of the geotechnical characteristics of the grounds with identical input data, and in terms of the numerical procedures adapted to model TBM advance. The synthesis of the results of the different models and their comparison with the experimental results then reveals a significant dispersion, proof that the estimation of the impact of a TBM on deep foundations remains an open subject at the present time, with a possible optimization of the projects.
Mots clés : tunnelier / fondations profondes / modélisation numérique / exercice de prévision
Key words: TBM / deep foundations / numerical modeling / benchmarking
© CFMS-CFGI-CFMR-CFG, 2022
1 Introduction
L’extension des villes et la demande croissante de mobilité, couplées à la volonté de limiter les impacts environnementaux, conduisent à une utilisation de plus en plus fréquente du sous-sol pour y développer des infrastructures souterraines. Or, les zones urbaines correspondent souvent à des terrains meubles et aquifères, où il est nécessaire de fonder de nombreux bâtiments et ouvrages d’art sur des pieux. Dans ce type de terrain, l’utilisation d’un tunnelier à front pressurisé (de type « pression de terre », « pression de boue », ou « à densité variable ») pour le creusement de tunnels constitue un moyen de garantir la stabilité de l’ouvrage lors du creusement, limiter les tassements en surface et réduire l’impact sur les structures avoisinantes.
La prévision de l’influence du creusement pressurisé des tunnels sur des pieux est un problème géotechnique assez délicat. Cela est lié tout d’abord à la difficulté d’estimation des déplacements induits par le tunnelier dans le terrain en raison du caractère tridimensionnel du problème, des multiples sources de déplacement autour de la machine, et des difficultés inhérentes au comportement mécanique des sols (élasticité non linéaire, plasticité, pressions interstitielles, effet du temps, etc.). L’évaluation de l’impact du creusement sur des pieux ajoute des difficultés spécifiques liées à la définition des propriétés d’interface terrain / pieu, et aux incertitudes qui souvent demeurent dans les projets quant à la géométrie exacte des pieux et à leur procédé constructif.
Plusieurs équipes de recherche ont à ce titre développé des expérimentations pour comprendre les phénomènes d’interaction tunnelier / terrain / pieu. Celles-ci peuvent être classées en deux catégories :
-
des expérimentations en vraie grandeur : à Amsterdam (Kaalberg et al., 2005), Singapour (Pang et al., 2006), Londres (Standing et Selemetas, 2013) et Shanghai (Liu et al., 2014) ;
-
des modèles physiques, centrifugés ou sous gravité : Loganathan et al. (2000), Jacobsz et al. (2004), Bel (2018), etc.
Des équipes de recherche ont, sur la base ou en parallèle des expérimentations, développé des approches théoriques, permettant de construire des outils qui puissent être utilisés pour prévoir les effets du creusement. Deux catégories peuvent être distinguées :
-
des approches analytiques : Chen et al. (1999), Basile (2014), Franza et al. (2017), Zhang et al. (2018), etc. ;
-
des modélisations numériques (cf. ci-après).
La littérature consacrée à l’estimation des déplacements induits par le creusement au tunnelier « en champ libre » (sans pieux) via des modélisations numériques est riche, à la fois avec des approches bidimensionnelles et tridimensionnelles. Plusieurs approches sont possibles pour tenir compte des différents types de pertes de volume autour du tunnelier dans les approches bidimensionnelles : les méthodes dites « à rigidité variable » (Swoboda, 1979 ; Karakus et al., 2007), les méthodes dites « du gap » (Rowe et al., 1983 ; Vermeer et Brinkgreve, 1993) et les méthodes « à pressions imposées » (Finno et Clough, 1985 ; Berthoz et al., 2020). Dans les approches tridimensionnelles, les différents chargements régnant autour du tunnelier sont imposés, et la progression du tunnelier est modélisée sous la forme de succession d’étapes discrètes (Swoboda et Abu-Krisha, 1999 ; Mroueh et Shahrour, 2008 ; Dias et Kastner, 2013) ou, plus rarement, via un avancement pseudo-continu du tunnelier (Komiya et al., 1999 ; Meschke et al., 2011). Des précisions relatives aux différents chargements imposés dans chacun de ces modèles peuvent être trouvées dans El Jirari (2021). Noter qu’il n’existe pas, pour l’instant, de guide technique, recommandation, ou norme de dimensionnement spécifiant quel type de modèle privilégier pour un niveau d’étude donné.
Un ou plusieurs pieux ont été ajoutés dans certains des modèles numériques tridimensionnels précédemment cités, afin d’étudier l’impact du creusement au tunnelier sur une fondation profonde. Ces modèles sont peu nombreux dans la littérature scientifique. Citons Jongpradist et al. (2013), Meschke et al. (2013), Soomro et al. (2015), Hong et al. (2015) et Nematollahi et Dias (2019). Ces auteurs ont notamment montré que les modèles en déformations planes sont insuffisants pour bien tenir compte de l’interaction tunnelier / terrain / pieu (Soomro et al., 2015), et qu’un modèle de comportement avancé (avec écrouissage déviatorique et volumique) conduisait à des résultats plus proches des observations expérimentales en champ libre dans le cas étudié (Nematollahi et Dias, 2019). Les différents auteurs ont également effectué plusieurs calculs en faisant varier la position du pieu par rapport au tunnel, ce qui leur a permis de conforter les « zones d’influence » (représentation schématique du tassement de la tête du pieu par rapport au tassement du terrain en champ libre à la même distance transversale du tunnel) mises en évidence expérimentalement par différents auteurs, et synthétisées dans Michalski et al. (2022a). L’ensemble des modèles numériques de l’interaction tunnelier /terrain / pieu précédemment cités n’a cependant pas fait l’objet de comparaisons avec des mesures réalisées dans des pieux. Les tendances mises en évidence ne doivent par conséquent être vues que de manière relative, à procédé de modélisation numérique constant.
La complexité et les temps de calcul importants inhérents à ces approches 3D ont limité leur transposition vers l’ingénierie. En conséquence, dans le cadre des projets, des approches simplifiées sont encore souvent utilisées, avec un coefficient de sécurité difficile à estimer.
Compte-tenu de cela, une optimisation des projets reste possible à travers une meilleure évaluation des contraintes techniques et de la provision financière associée aux dommages qui pourraient être générées par le creusement (AFTES GT16, 2018).
Cette problématique intéresse en particulier la Société du Grand Paris, maître d’ouvrage du plus grand projet d’infrastructure en cours de construction en Europe, le « Grand Paris Express » (GPE), confronté à plus de 2000 bâtis fondés sur pieux dans la zone d’influence géotechnique des 200 km de tunnels à réaliser.
C’est dans ce contexte que le projet de recherche TULIP (TUnneliers et Limitation des Impacts sur des Pieux) a été conçu par la Société du Grand Paris Express (SGP), le Centre d’Études des Tunnels (CETU), l’École Nationale des Travaux Publics (ENTPE) et l’Université Gustave Eiffel (UGE). Le cœur de ce projet de recherche est une expérimentation en vraie grandeur réalisée sur la ligne 16 du futur GPE. Trois pieux de 500 mm de diamètre extérieur ont été spécialement construits, instrumentés et chargés dans la zone d’influence d’un des tunneliers du projet. Une instrumentation détaillée du terrain (inclinomètres, extensomètres, cibles topographiques) a également été mise en place, et les données de pilotage du tunnelier au cours du franchissement ont été recueillies et analysées. L’ensemble des mesures acquises lors du passage du tunnelier (juillet 2020) a été exploité et les résultats obtenus ont fait l’objet de deux publications scientifiques : Michalski et al. (2022b) et Mohamad et al. (2022).
Les partenaires du projet TULIP ont également souhaité organiser un exercice de prévision de l’impact du tunnelier sur un des pieux de cette expérimentation, afin de mobiliser la profession autour de cette problématique, et de confronter les différentes pratiques. Cet exercice, réalisé pendant l’année 2021, a été un succès : dix-neuf entreprises, bureaux d’études, concepteurs de logiciels de calcul géotechnique et universitaires ont participé.
Ce type d’exercice a déjà été réalisé sur différents problèmes de géotechnique, mais rarement dans le domaine des tunnels. Une référence disponible dans ce domaine est l’exercice réalisé par l’association allemande des tunnels décrit dans Schweiger (2002). Dans cet exercice purement numérique (au sens où il n’y avait pas de référence à des résultats expérimentaux), le problème consistait à évaluer les déplacements induits en surface, dans le cas d’une approche en déformations planes, pour des paramètres donnés de résistance et de déformabilité du terrain (comportement non drainé), modélisant le creusement du tunnel par une perte de volume imposée. Malgré la simplicité de ce problème académique, des écarts significatifs ont été constatés par les auteurs, et principalement expliqués par : (i) une trop faible extension transversale des modèles (effets de bords), (ii) des procédés de génération de la perte de volume en paroi du tunnel différents entre les différents logiciels de calcul utilisés.
L’exercice organisé dans le cadre du projet TULIP apporte des éléments nouveaux sur ce plan. Dans un premier temps, son sujet est présenté, puis les hypothèses effectuées par les différents participants sont détaillées. Les résultats obtenus sont ensuite confrontés entre eux et aux résultats expérimentaux, ce qui permet d’en tirer plusieurs enseignements.
2 Présentation de l’exercice
2.1 Objectifs des calculs
Trois pieux de différentes longueurs et à différentes positions par rapport à l’axe du tunnel ont été réalisés dans le cadre de l’expérimentation TULIP ( Fig. 1). L’exercice est focalisé sur le pieu le plus long (appelé P3). Ce pieu a un diamètre de 500 mm, une longueur de 20,5 m (soit presque jusqu’à l’axe du tunnel) et l’axe du pieu est distant de 5 m par rapport au piédroit du tunnel (Fig. 1a). Il s’agit d’un pieu en béton, armé par 8 filants HA14. Ce pieu a été réalisé à la tarière creuse (foration, injection de béton, puis descente de la cage d’armature dans le béton frais).
La charge exercée en tête du pieu pendant toute la durée de l’expérimentation est égale à 2060 kN (210 t), cette charge pouvant modéliser le poids d’une partie de bâtiment. Elle est appliquée grâce à un vérin prenant appui sur un massif poids en acier (Fig. 1b). Une rotule placée entre le vérin et le massif de réaction permet d’éviter l’apparition de moments parasites en tête. Ce pieu peut être considéré comme élastique, linéaire et isotrope avec un module d’Young croissant avec la profondeur, valant 38 GPa en tête et 48 GPa en pointe, ces valeurs étant déduites des mesures effectuées au cours de son chargement. La tête du pieu a tassé de 1,9 mm au cours du chargement (de 0 à 2060 kN).
Les conventions d’orientation et de signe retenu sont indiquées sur la figure 1a, en particulier : Z pour la direction verticale (positive vers le haut), X pour la direction horizontale longitudinale (positive dans le sens du creusement) et Y pour la direction horizontale transversale au tunnel (positive vers la gauche dans le sens du creusement afin d’avoir un repère (X, Y, Z) direct).
L’objectif de l’exercice était d’estimer les grandeurs suivantes :
-
la distribution de l’effort normal dans le pieu après le chargement, Nini ;
-
le tassement maximal final en surface du terrain induit par le tunnelier « en champ libre » (i.e. loin du pieu) noté uzmax-terrain ;
-
les distances transversales pour lesquelles le tassement en surface vaut respectivement 60 % et 30 % du tassement maximal (dans l’axe), notées Y60%-uzmax, Y30%-uzmax ;
-
le tassement maximal uzmax-P3 de la tête du pieu après passage du tunnelier ;
-
la distribution de l’effort normal dans le pieu après le passage du tunnelier, Nfin ;
-
le moment fléchissant transversal final Mx-fin dans le pieu après passage du tunnelier.
Les participants étaient libres d’utiliser l’approche qui leur convenait : les prévisions pouvaient découler de modèles semi-empiriques, analytiques ou numériques, 2D ou 3D.
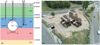 |
Fig. 1 Coupe transversale (TBM vu de face) (a) et vue aérienne (b) de l’expérimentation en vraie grandeur. Cross-section (front view of TBM) (a) and aerial view (b) of the full-scale experiment. |
2.2 Données d’entrée
Pour mener à bien cet exercice, les participants disposaient de la coupe fournie sur la figure 1a, considérée comme représentative de la zone étudiée, les différentes formations en place à partir de la surface étant les suivantes :
-
Remblais (R : 3,5 m d’épaisseur). D’origine anthropique donc récents, ces remblais sont constitués d’un mélange de marnes argileuses beiges à marrons, et de graves calcaires centimétriques ;
-
Calcaires de Saint-Ouen (CSO : 9,8 m d’épaisseur). Cette formation du Bartonien supérieur (−38 Ma environ) est globalement assez homogène. Elle est constituée de calcaires marneux beiges tendres comportant des inclusions de graves calcaires centimétriques ;
-
Sables de Beauchamp (SB : 10,2 m d’épaisseur). Cette formation du Bartonien inférieur (−41 Ma environ) est constituée de sables fins argileux beiges à verdâtres. Quelques inclusions de grès centimétriques ont été relevées dans un sondage mais celles-ci restent rares ;
-
Marnes et Caillasses (MC : 11,3 m d’épaisseur). Cette formation du Lutétien supérieur (−43 Ma environ) est constituée de calcaires marneux beiges à blanchâtres indurés et fragmentés. Cette formation surmonte les Calcaires Grossiers (CG), qui peuvent ici être considérés comme substratum indéformable compte-tenu de leurs caractéristiques mécaniques.
Compte-tenu des niveaux piézométriques relevés régulièrement dans le secteur, un seul aquifère constitué des Marnes et Caillasses, Sables de Beauchamp et de la base des Calcaires de Saint-Ouen peut être considéré. Le toit de la nappe est stable, à une cote comprise entre 48,2 NGF et 48,8 NGF. On retiendra le niveau des hautes eaux (48,8 NGF, soit 11,5 m de profondeur) pour l’exercice. Les perméabilités horizontales des Calcaires de Saint-Ouen, Sables de Beauchamp et Marnes et Caillasses sont comprises entre 10−5 et 10−4 m/s. Les perméabilités verticales sont environ dix fois plus faibles que les perméabilités horizontales dans ces formations.
Sur le plan mécanique, l’ensemble des coupes et courbes pression-volume des trois sondages pressiométriques réalisés dans l’emprise de l’expérimentation a été transmis aux participants. À noter qu’un des sondages a été réalisé au droit du pieu P3, et que les essais ont été réalisés à l’intérieur d’un tube fendu (épaisseur 4 mm, diamètre extérieur 63 mm). Les valeurs moyennes par formation ont également été synthétisées dans le tableau 1. La synthèse des essais de laboratoire (essais triaxiaux et essais œdométriques) réalisés spécifiquement pour l’expérimentation ou plus globalement pour le creusement de la Ligne 16, a également été transmise sous la forme des éléments indiqués dans le tableau 1.
Le tunnelier utilisé est un tunnelier à pression de terre de marque Herrenknecht, constitué des éléments suivants : (i) une roue de coupe mixte de diamètre 9,87 m, de taux d’ouverture 30 %, comportant 26 molettes de 18 pouces et 200 couteaux, (ii) un bouclier avant de 9,83 m de diamètre extérieur et 3,5 m de longueur, (iii) un bouclier central de 9,815 m de diamètre extérieur et 3,5 m de longueur, et (iv) une jupe de 9,80 m de diamètre et 4,0 m de longueur. La différence de diamètre entre l’excavation et l’extrémité de la jupe est par conséquent égale à 70 mm, pour une longueur totale du bouclier égale à 11,0 m. Le diamètre intrados du tunnel est égal à 8,70 m, l’épaisseur des voussoirs est égale à 40 cm, le diamètre extrados des voussoirs est donc de 9,50 m.
Lors du passage du tunnelier à proximité du pieu P3 la vitesse de creusement est quasi-constante (environ 20 mm/min), et les valeurs des paramètres de pilotage du tunnelier sont pratiquement stationnaires : (i) une pression dans la chambre d’abattage valant 130 kPa en clé et 220 kPa en radier, (ii) un effort complémentaire exercé par les parties métalliques de la roue de coupe sur le front de taille (« soutènement mécanique ») égal à 7000 kN, (iii) l’absence d’injections le long du bouclier, et (iv) une pression d’injection du mortier de bourrage à proximité de la clé égale à 175 kPa.
Seuls ces éléments ont été transmis aux participants pour la première phase de l’exercice, nommée phase no1 dans la suite de cet article, et s’étant déroulée de février à avril 2021.
Des éléments complémentaires ont ensuite été transmis à la fin du mois de mai 2021, pour réception de nouvelles réponses fin juillet 2021 :
-
phase no2 : pour celle-ci les participants ont recalé leurs modèles en considérant, d’une part que l’effort de pointe du pieu post-chargement était nul, et d’autre part que, pour la cuvette de tassement du terrain « en champ libre », on avait mesuré les paramètres suivants : uzmax-terrain = −10,0 mm, Y60%-uzmax = 8,0 m, et, Y30%-uzmax = 12,5 m ;
-
phase no3 : pour cette partie de l’exercice, on cherchait à étudier séparément l’influence de la façon dont le creusement était modélisé, en imposant aux participants d’utiliser le modèle de comportement Hardening Soil Model (HSM : Schanz et al., 1999) pour chaque formation avec des paramètres donnés.
Synthèse des caractéristiques mécaniques mesurées.
Summary of measured mechanical characteristics.
3 Synthèse des hypothèses effectuées par les différents participants
3.1 Types de modèle
Dix-neuf organismes ont répondu à l’exercice : onze bureaux d’ingénierie (Amberg Engineering, Antea Group, Egis, ERG Géotechnique, Fondouest, Geotec, Lombardi, Pini France, Setec-Terrasol, Systra et Tractebel-Engie), quatre entreprises de travaux (Eiffage Génie Civil assisté de Géomod, Bouygues Travaux Publics, Spie Batignolles et Vinci Construction), deux concepteurs de logiciels de calcul géotechnique (Itech assisté de Socotec, et Itasca), et deux écoles / universités (l’ISBA TP et l’Université de Liège).
Bien que cela n’ait pas été imposé, tous ont répondu avec des modélisations numériques. Il n’a pas été utilisé d’approches analytiques, ou empiriques déduites d’expériences antérieures in situ ou en laboratoire.
Trois participants ont découplé le problème. Dans un premier temps, ils ont construit un modèle numérique représentant l’impact du tunnelier sur le terrain traversé (deux participants via un modèle 2D en déformations planes, et un participant via un modèle 3D). Les déplacements induits dans le terrain ont ensuite été introduits dans un calcul de pieu utilisant la méthode du coefficient de réaction (logiciel Foxta de Setec-Terrasol [2022]).
Les seize autres participants ont construit des modèles numériques complets intégrant non seulement le tunnelier et le terrain mais aussi le pieu. Dix ont travaillé sur des modèles 2D en déformations planes en section courante de l’ouvrage, et neuf ont utilisé des modèles 3D.
Quatre codes de calcul reposant sur la méthode des éléments finis (Plaxis 2D/3D, César-LCPC 2D/3D, Zsoil 3D et Lagamine 2D), et un code reposant sur la méthode des différences finies (Flac 3D) ont été utilisés.
3.2 Modèles de comportement du terrain
Le choix d’un modèle de comportement dépend de la nature des terrains. À titre d’exemple, Demagh et al. (2013) ont montré qu’un modèle élastique linéaire-parfaitement plastique (avec le critère de Mohr–Coulomb), permettait de bien reproduire la cinématique du terrain autour du tunnel de Toulouse réalisé dans des argiles surconsolidées. Dans les sols granulaires (principalement composés de limons, sables ou graviers), une abondante littérature tend plutôt à montrer qu’un modèle considérant la non-linéarité du comportement élastique (dépendance du module de déformation vis-à-vis de la pression moyenne), la distinction entre le module de déformation en décharge/recharge et le module de déformation tangent, et/ou l’existence d’au moins un mécanisme d’écrouissage (sur chemin de chargement déviatorique en particulier), donne des résultats nettement plus fiables pour évaluer la cinématique du terrain autour du tunnel (par exemple Nematollahi et Dias [2019]).
Dans le cas étudié, les terrains mobilisés sont plutôt de nature granulaire. C’est pourquoi un seul participant a utilisé un modèle élastique parfaitement plastique de Mohr–Coulomb. La large majorité des participants (15/19) a attribué un modèle de comportement de type Hardening Soil Model (HSM) (Schanz et al., 1999) aux différents faciès. Un autre participant a utilisé une version étendue du HSM, appelée HSSM (disponible dans les logiciels Plaxis, ZSoil, Flac…), où la rigidité en très petites déformations fait l’objet de paramètres complémentaires. Les deux derniers ont utilisé des lois de comportement moins fréquemment utilisées : (i) un modèle élasto-plastique avec un critère de Mohr–Coulomb et une évolution de l’angle de frottement avec la déformation (Pardoen et al., 2015), (ii) un modèle élastique, non-linéaire et isotrope transverse, combiné au critère de Mohr–Coulomb (Gilleron et al., 2021).
Les paramètres de déformabilité considérés par les participants diffèrent fortement. Compte-tenu des données transmises, deux approches ont été utilisées pour évaluer les modules E50 (module tangent à 50 % du déviateur ultime) à mi-couches : une évaluation à partir des modules pressiométriques (via une corrélation du type k.EM/α où α est le coefficient rhéologique de Ménard), ou une évaluation à partir des essais de laboratoire. L’approche à partir des modules pressiométriques a été retenue par treize participants. Les choix d’une moyenne arithmétique ou harmonique entre les différents essais pressiométriques et les choix de coefficient k, conduisent à des modules variant d’un facteur six entre les valeurs minimales et maximales retenues dans les terrains principalement mobilisés (CSO et SB), comme le montre la figure 2a. À titre indicatif, les modules correspondant à une hypothèse de coefficient k = 2, à un coefficient rhéologique α = ½, et au choix d’une moyenne arithmétique des modules pressiométriques sont représentées en pointillés sur cette figure.
Les six autres participants ont retenu des modules dans les intervalles fournis dans le tableau 1 à partir des essais de laboratoire. Les valeurs plutôt hautes des intervalles ont été souvent considérées, avec un facteur deux à trois entre les valeurs minimales et maximales retenues dans les SB (Fig. 2b). De manière générale, il convient de noter que des modules deux à trois fois plus faibles en moyenne ont été retenus lorsque le choix était tiré des essais de laboratoire, que lorsqu’il était tiré des essais pressiométriques.
Les modules pressiométriques augmentent clairement avec la profondeur dans les calcaires de Saint-Ouen et les Sables de Beauchamp (points bleus sur la Fig. 2c) : ceux-ci varient d’environ ± 50 % lorsque la profondeur varie de ± 4 m par rapport au milieu de la couche considérée. Onze participants tiennent compte en partie de cette augmentation en retenant m = 0,5 parmi les paramètres du modèle HSM mais cela reste insuffisant (courbe violette sur la Fig. 2c). Un participant tient compte de cette augmentation réelle en faisant évoluer le module E50 linéairement avec la profondeur (courbe verte). Deux autres participants utilisent un artifice pour tenir compte de ce contraste : ils scindent les couches de CSO et SB en deux sous-couches dans lesquelles les modules sont constants mais différents.
Concernant la résistance au cisaillement des terrains, notamment les SB, les données transmises fournissaient un fuseau resserré : [c’ = 10 kPa ; φ’ = 33°] à [c’ = 0 kPa ; φ’ = 41°]. Le couple [c’ = 10 kPa ; φ’ = 33°] a été majoritairement retenu, mais certains participants ont retenu [c’ = 0 kPa ; φ’ = 35°] ou [c’ = 10 kPa ; φ’ = 41°], sans justifier le choix effectué.
Treize participants ont estimé le coefficient de pression des terres au repos K 0 a été estimé grâce à la formule de Jaky (K 0 = 1−sin(φ’)), soit 0,45 < K 0 < 0,55 en fonction des différentes formations. Un participant a légèrement majoré ce coefficient (K 0 = 0,6 pour toutes le formations sauf les remblais). Un participant a considéré un état de contrainte isotrope (K 0 = 1,0), sans justifier ce choix. Les quatre derniers n’ont pas précisé les valeurs qu’ils ont retenues.
 |
Fig. 2 Synthèse des hypothèses effectuées en termes de déformabilité des terrains. Summary of assumptions made in terms of ground deformability. |
3.3 Principes de modélisation du creusement au tunnelier
Le processus de creusement au tunnelier se caractérise par des sources potentielles de pertes de volume le long de l’ouvrage en construction, à différentes distances du front de taille. Ce problème est par conséquent clairement tridimensionnel.
Quatre approches 3D ont été utilisées par les participants ; l’une d’entre elles n’a pas été décrite ce qui ne permet pas de la commenter. Les trois autres ont en commun l’application d’une pression frontale représentant la pression dans la chambre d’abattage, en tenant compte d’un gradient vertical, et prenant parfois en compte l’effort de confinement du front de taille exercé par les parties métalliques de la roue de coupe ( Fig. 3a). Elles ont également en commun l’application de la pression du mortier de bourrage Pb en sortie de jupe. Elles diffèrent par contre sur les conditions aux limites imposées le long du bouclier : (i) un participant a considéré que la pression frontale s’exerçait aussi tout le long du bouclier (a1), (ii) trois participants n’ont pas exercé de pression le long du bouclier (en raison de l’absence d’injection de bentonite) et ont vérifié que la convergence du terrain ur-max restait inférieure à l’espace annulaire disponible (a2), et (iii) quatre participants ont modélisé explicitement le bouclier et l’ont contracté pas à pas (a3). Cette dernière procédure semble discutable si la convergence du terrain ne suffit pas à combler l’espace annulaire disponible, générant a priori des efforts de traction non réalistes sur le contour de l’excavation.
La transposition du problème en déformations planes nécessite un artifice pour tenir compte du caractère tridimensionnel du problème. Sept participants ont utilisé un déconfinement presque total (effet résiduel du front de taille inférieur ou égal à 10 %) et l’application d’une pression radiale Pr comprise entre 0 et 130 kPa en clé (Fig. 3b) : cette forte variation de Pr entre les participants correspond à celle entre les deux premiers cas décrits précédemment en 3D (a1 et a2). Un participant (b2) a utilisé un taux de déconfinement corrigé par la pression frontale (Aristaghes et Autuori, 2001). Un autre (b3) a imposé directement une perte de volume en paroi, sans tenir compte des pressions réelles exercées par le tunnelier. Enfin, le dernier participant (b4) a réalisé au préalable un calcul axisymétrique tenant compte des différentes pressions exercées par le tunnelier (avec une hypothèse de symétrie de révolution autour de l’axe du tunnel), et en a déduit un taux de déconfinement à retenir pour ce projet.
 |
Fig. 3 Synthèse des procédés utilisés pour modéliser le processus de creusement au tunnelier. Summary of the processes used to model the tunneling process. |
3.4 Principes de modélisation du pieu
Dans les modèles 3D, le pieu a été modélisé sous la forme d’éléments volumiques par six participants, et sous forme d’éléments linéiques par deux participants. Dans les calculs en déformations planes, le pieu est, par définition, transformé en une plaque de longueur infinie dans la direction orthogonale à la section étudiée. Pour corriger cet effet géométrique, les participants prennent en compte un « espacement fictif » conduisant à : (i) la réduction du module d’Young et/ou de la largeur du pieu fictif lui permettant de conserver une rigidité en flexion et en compression identiques au pieu réel, (ii) une modification des paramètres d’interface terrain / pieu permettant de ne pas dépasser la résistance au cisaillement mobilisable autour du pieu réel cylindrique. Cet « espacement fictif » a été retenu dans une gamme comprise entre 1 m et 10 m (soit respectivement deux fois et vingt fois le diamètre du pieu).
En termes de conditions d’interface terrain / pieu, trois participants ont considéré une adhérence parfaite. Neuf participants ont considéré un frottement latéral constant (critère de Tresca). Les valeurs de frottement latéral unitaire retenues varient d’un facteur deux environ (110 à 170 kPa dans les CSO, et 80 à 170 kPa dans les SB). Les sept autres participants ont retenu un frottement latéral fonction de la contrainte normale (critère de Mohr–Coulomb) avec des paramètres de résistance au cisaillement (c’ et tan φ’) qui, lorsqu’ils sont documentés, sont de l’ordre de 80 % de ceux du terrain avoisinant.
4 Résultats initiaux (phase no1)
4.1 Effort normal dans le pieu après chargement
Expérimentalement, le chargement du pieu a été réalisé en six paliers, jusqu’à ce que la charge de service (2060 kN) soit atteinte. Le tassement de la tête du pieu a été suivi via quatre cibles topographiques avec une précision de l’ordre de ± 0,2 mm. Les déformations axiales du pieu ont été mesurées par sept niveaux (−1 m, −4 m, (…), −19 m) de quatre cordes vibrantes placées sur des filants de la cage d’armature du pieu situés à 90° les uns des autres. Les efforts axiaux dans le pieu à la fin du chargement en ont été déduits, et sont représentés en rouge sur la figure 4. Compte-tenu du fort élancement du pieu (longueur / diamètre = 38), la quasi-totalité de l’effort exercé en tête est repris par frottement latéral : l’effort de pointe est quasi-nul.
La majorité des modèles numériques produits surestime l’effort de pointe : pour certains modèles, il atteint 1000 kN, soit 50 % de la charge en tête. Cette surestimation est particulièrement visible pour les modèles 2D en déformations planes, en particulier s’ils font en plus l’hypothèse d’une adhérence parfaite terrain / pieu (modèles P10 et P17 de la Fig. 4).
De bons résultats ont pu être obtenus avec des modèles numériques (éléments finis ou différences finies) 3D (ou axisymétrique), ou avec des modèles au coefficient de réaction. Les participants 2 et 12 ont obtenu des résultats très proches du profil expérimental avec des approches différentes (3D différences finies pour le premier, coefficient de réaction pour le second). Si l’on exclut les modèles en déformation plane, les écarts entre les différents modèles s’expliquent surtout par la variété des hypothèses retenues pour le frottement latéral.
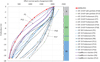 |
Fig. 4 Efforts normaux dans le pieu après chargement (phase no1). Normal forces in the pile after loading (phase no1). |
4.2 Tassement en surface du terrain
Les tassements en surface du terrain « en champ libre » (hors influence du pieu) ont été mesurés le long des sections transversales notées SMRN et SMRS sur la figure 1b, qui comportent des cibles topographiques espacées de 2,0 m suivies par deux stations totales. La précision des mesures est de l’ordre de ± 0,2 mm. Ces mesures ont révélé un tassement maximal du terrain égal à 10,0 mm, et une distance transversale du point d’inflexion de la cuvette (paramètre iy de l’expression classique de Peck) égale à 8,0 m.
Les résultats numériques obtenus sont synthétisés sur la figure 5. Notons tout d’abord qu’environ 50 % des participants (dix réponses) ont donné pour le tassement maximal en surface une valeur comprise entre 5 et 15 mm (encadrant les 10 mm mesurés). Trois participants ont fortement sous-estimé l’amplitude des tassements (2 à 3 mm), et quatre participants l’ont fortement surestimée (20 à 50 mm). Il est intéressant de constater que les écarts obtenus ne sont pas directement corrélés aux variations d’hypothèses concernant la déformabilité des terrains : la large dispersion des choix de module E50 dans les faciès sollicités (CSO et SB) ne conditionne pas l’amplitude des tassements calculés (Fig. 5a et 5b). On en conclut que le processus de modélisation du creusement au tunnelier influence aussi la réponse des modèles. Il est en particulier intéressant de noter que les modèles 3D ne s’avèrent pas systématiquement meilleurs que les modèles 2D en déformations planes pour calculer le tassement maximal.
La figure 5c montre que l’extension transversale de la cuvette de tassement générée en surface est surestimée d’environ 50 % (60 % du tassement maximal est atteint à 12,0 m de l’axe au lieu de 8,0 m) pour la quasi-totalité des modèles, que ceux-ci soient 3D ou 2D. Seule la réponse utilisant la loi de comportement ANL (élasticité à anisotropie transverse, Gilleron et al., 2021) donne la bonne extension : la loi de comportement en question a été développée spécifiquement pour améliorer la représentativité des simulations numériques pour cet aspect précis.
Les tassements différentiels maximaux déduits des tassements au-dessus de l’axe et des distances transversales iy en faisant l’hypothèse d’un profil gaussien, sont compris entre 0,2 et 3 ‰ (Fig. 5d). Le rectangle vert sur cette figure correspond à la limite courante des tassements et tassements différentiels acceptables par un bâtiment sensible pour lequel on autoriserait uniquement l’apparition de dommages architecturaux (AFTES GT16, 2018). Cette comparaison montre que la majorité des modèles numériques réalisés sont optimistes (ils sous-estiment les tassements et tassements différentiels, donc le niveau de dommage sur les avoisinants). Inversement, quatre modèles réalisés dépassent les seuils de sensibilité fixés (modèles 3, 14, 15 et 17 sur la Fig. 5d), ce qui aurait pu se traduire par des adaptations de conception dans le cadre d’un projet réel.
 |
Fig. 5 Tassements en surface du terrain « en champ libre » (phase no1) : (a) Tassement maximal en fonction du module des CSO ; (b) Tassement maximal en fonction du module des SB ; (c) Extension transversale de la cuvette de tassement ; (d) Tassements différentiels et niveau de dommage potentiel. Greenfield surface settlement (phase no1): (a) Maximum settlement as a function of the CSO modulus; (b) Maximum settlement as a function of the SB modulus; (c) Cross-sectional extension of the settlement basin; (d) Differential settlements and potential damage level. |
4.3 Tassement du pieu
Le tassement final de la tête du pieu mesuré après le passage du tunnelier valait 5,2 mm. Les modèles numériques donnent des valeurs comprises entre 2 et 52 mm, soit 0,5 à 10 fois le tassement réel du pieu (colonnes de gauche pour chaque participant sur la Fig. 6). La dispersion des résultats est par conséquent importante. Il convient de noter que la charge exercée en tête du pieu est de l’ordre de 33 % de sa capacité portante : des écarts plus importants auraient peut-être été obtenus en cas de pieux chargés davantage.
Sur cette figure sont également repris les tassements maximaux du terrain calculés (colonnes de droite pour chaque participant). Les tassements du pieu et du terrain ne sont pas extraits à la même distance transversale de l’axe donc ne doivent pas être comparés directement en vue d’en déduire les variations d’efforts internes dans le pieu. Toutefois, la figure montre qu’une bonne estimation du tassement du terrain « en champ libre » ne garantit pas nécessairement une bonne estimation du tassement du pieu. La réponse du participant no5 en est un bon exemple : le tassement maximal du terrain est parfaitement estimé, mais le tassement du pieu est sur-estimé d’un facteur deux.
La figure 6 ne montre pas de tendance claire quant à l’influence du type de calcul réalisé. Les participants no3 et 5 ont tous deux réalisés des modèles numériques 3D : le premier surestime très fortement le tassement du terrain (x5) et fortement le tassement du pieu (x2), le second estime très bien le tassement du terrain mais surestime également le tassement du pieu (x2). Ces deux modèles diffèrent principalement par les conditions imposées le long du bouclier : application d’une pression radiale nulle, ou égale à la pression frontale. On peut également s’intéresser aux réponses des participants no10 et 17 : ce sont deux modèles numériques 2D en déformations planes avec adhérence parfaite pieu/terrain, mais avec des lois de comportements du terrain différentes (HSM vs. Pardoen et al., 2015), et un taux de déconfinement en paroi différent (0,9 vs. 0,5). Les résultats sont très différents en termes d’amplitude globale des tassements, et en termes de rapport entre le tassement du terrain et le tassement du pieu. Enfin, les trois participants ayant réalisé des calculs aux coefficients de réaction obtiennent des résultats différents, notamment le participant no6 qui sous-estime plus fortement le tassement du pieu, alors que son estimation du tassement maximal du terrain est intermédiaire entre celles des participants no4 et 12. La totalité du champ de déplacement (horizontal et vertical) imposé au pieu ainsi que les propriétés d’interface terrain / pieu expliquent ces différences, mais les données transmises ne nous permettent pas d’aller plus loin dans l’analyse.
 |
Fig. 6 Tassements de la tête du pieu en fonction du tassement maximal en surface du terrain (phase no1). Settlement of the pile head as a function of the maximum surface settlement of the ground (phase no1). |
4.4 Effet du passage du tunnelier sur les efforts dans le pieu
Les efforts internes mesurés et calculés dans le pieu après passage du tunnelier sont synthétisés sur la figure 7.
Analysons tout d’abord les efforts axiaux. Afin d’effacer les écarts entre les efforts calculés numériquement en fin de chargement et les mesures (cf. Sect. 4.1), et même si ce choix peut se discuter en raison des non-linéarités du comportement du pieu, on représente sur la figure 7a les incréments d’efforts induits par le passage du tunnelier. Expérimentalement, le passage du tunnelier induit une augmentation de l’effort axial sur toute la hauteur du pieu. Cette augmentation est de l’ordre de 400 kN à 7 m de profondeur (soit +50 % par rapport aux valeurs initiales données en Fig. 4) et de l’ordre de 850 kN à 16 m de profondeur (soit +600 %). Six participants à l’exercice de prévision donnent des augmentations d’efforts axiaux avec moins de 50 % d’erreur par rapport aux mesures, trois participants les surestiment fortement (d’un facteur 2 à 3), et sept les sous-estiment très fortement (au moins d’un facteur 4). Plusieurs modèles (17, 4, 6) ne donnent pas de variations significatives des efforts axiaux lors du passage du tunnelier bien que ces modèles n’utilisent pas les mêmes conditions d’interface terrain / pieu.
On ne peut pas attribuer ces différences de réponse uniquement au type d’approche mise en œuvre. Toutefois, on peut souligner que : (i) les modèles 2D en déformations planes ont globalement tendance à être trop optimistes, en sous-estimant les variations d’efforts (P17, P1, P8), (ii) deux modèles 3D s’avèrent très pessimistes (P3 et P15), cela étant principalement dû à une forte surestimation du tassement du terrain. Cette figure illustre également le caractère assez complexe de la cinématique induite par le passage du tunnelier (en particulier les déplacements relatifs sol / pieu) : le modèle no2 estime en effet très bien l’effort initial dans le pieu post-chargement, le tassement du terrain et du pieu post-creusement (cf. Sect. 4.1), et l’effort axial induit post-creusement à 16 m de profondeur, mais surestime l’effort axial à 7 m de profondeur d’environ 60 %.
Les moments fléchissants transversaux mesurés dans le pieu après le creusement ont été faibles, de l’ordre de ± 20 kN.m (Mohamad et al., 2022). La plupart des modèles numériques conduisent à des moments du bon ordre de grandeur. Toutefois, plusieurs modèles de différents types (2D déformations planes avec adhérence parfaite terrain / pieu, 2D déformations planes avec frottement terrain / pieu, ou 3D avec frottement terrain / pieu) surestiment ces moments. Les couples (effort axial ; moment fléchissant) calculés dans la section du pieu la plus sollicitée sont ainsi parfois en limite d’admissibilité. Ces modèles auraient pu conduire à des adaptations de conception dans le cadre d’un projet. Notons également qu’il ne se dégage pas de tendance claire quant à l’influence du type de modèle réalisé, excepté peut-être le fait que les trois calculs aux coefficients de réaction ont plutôt sous-estimé ces moments fléchissants.
 |
Fig. 7 Efforts internes finaux dans le pieu, après passage du tunnelier : (a) Efforts normaux ; (b) Moments fléchissants transversaux (phase no1). Final internal forces in the pile, after passage of the TBM: (a) Normal forces; (b) Transverse bending moments (phase no1). |
5 Résultats obtenus après recalage (phases no2 et 3)
5.1 Réponse du terrain
Pour la deuxième phase de l’exercice, la valeur du tassement maximal mesuré à la surface du terrain (−10,0 mm) et les distances transversales par rapport à l’axe où le tassement vaut 60 % (respectivement 30 %) du tassement maximal, à savoir 8,0 et 12,5 m, ont été transmises aux participants.
Ces derniers ont principalement modifié les paramètres de déformabilité des SB et CSO de leurs modèles pour les recaler (dix participants) : une multiplication ou division allant jusqu’à deux a été retenue, ainsi que la prise en compte d’une évolution des modules avec la contrainte principale mineure (m = 0,5) pour ceux qui avaient considéré un module constant. Deux autres participants ont uniquement modifié le taux de déconfinement leur permettant de modéliser l’effet du tunnelier. Enfin, un participant a remplacé son modèle 2D en déformations planes par un modèle 3D. Les autres participants n’ont pas effectué de recalage.
Les réponses obtenues sont présentées sur la figure 8. Cette figure montre que tous les participants (sauf un) ont réussi à caler leur modèle pour qu’il reproduise correctement l’amplitude du tassement maximal en surface. En revanche, la quasi-totalité des modèles continue à surestimer assez fortement l’extension transversale de la cuvette de tassement. Modifier uniquement l’amplitude des modules ou le procédé de modélisation du creusement au tunnelier, sans modifier le modèle de comportement du terrain, ne permet par conséquent pas un recalage complet de la cuvette de tassement du terrain.
 |
Fig. 8 Effet du recalage des modèles vis-à-vis des tassements induits en surface du terrain. Effect of resetting the models with respect to induced ground surface settlements. |
5.2 Impact sur le pieu
Le fait que l’effort axial mesuré dans le pieu après le chargement soit quasiment nul sur les trois derniers mètres du pieu a également été transmis aux participants pour la phase no2 de l’exercice. Pour tendre vers ce résultat expérimental, quatre participants ont modifié les paramètres d’interface de leurs modèles. Un participant a tronqué le pieu : la partie inférieure du pieu étant considérée comme étant du terrain. Les autres participants n’ont pas effectué de recalage de leur modèle sur ce point, excepté la modification des caractéristiques mécaniques du terrain motivée par le recalage de la cuvette de tassement « en champ libre » décrit au paragraphe précédent.
La modification des caractéristiques mécaniques du terrain permet de mieux estimer le tassement final du pieu après passage du tunnelier ( Fig. 9a). La dispersion observée lors de la phase no1 (2 à 15 mm environ, pour l’ensemble des réponses sauf une) est réduite à l’intervalle [5 ; 10 mm] (en faisant abstraction d’une réponse donnant 17 mm). Une meilleure estimation des tassements du terrain « en champ libre » améliore par conséquent l’estimation du tassement du pieu.
Ces modifications permettent également d’améliorer l’estimation de la distribution de l’effort axial dans la hauteur du pieu (Fig. 9b) par rapport à la phase no1 (Fig. 4) : les efforts de pointe dans les modèles numériques sont compris entre 0 et 400 kN, contre 0 et 1000 kN lors de la phase no1.
Les variations d’efforts axiaux ne sont par contre pas significativement améliorées (Fig. 9c par rapport à la Fig. 7a) par le recalage des modèles. Deux exemples l’illustrent : (i) le participant no15 estime correctement le tassement du terrain, mais surestime le tassement du pieu et la variation d’effort axial associée, (ii) le participant no12 améliore l’estimation des déplacements induits mais obtient une moins bonne estimation des efforts internes dans le pieu. Ces deux exemples attestent du caractère complexe de la cinématique tunnelier / terrain / pieu : un bon calage du modèle « en surface » ne suffit pas pour estimer correctement la réponse du pieu lors du creusement.
 |
Fig. 9 (a) Tassement de la tête du pieu post-creusement ; (b) Effort axial initial post-chargement et ; (c) Variation d’efforts axiaux induites par le passage du tunnelier (phase no2). (a) Post-tunneling pile head settlement; (b) Initial post-loading axial force and; (c) Variation of axial forces induced by the passage of the TBM (phase no2). |
5.3 Analyses à modèle géotechnique imposé (phase no3)
Afin de réduire la variabilité des hypothèses effectuées en termes de modèle de comportement du terrain et de paramètres associés, un unique modèle géotechnique a été transmis aux différents participants pour la dernière phase de l’exercice. Ce modèle retient un comportement de type « Hardening Soil Model » pour chaque formation, avec notamment des modules sécant E50 valant respectivement 180 MPa et 500 MPa au milieu des couches de CSO et SB, et évoluant avec la contrainte principale mineure avec un exposant m = 0,5. Chaque participant a conservé le procédé de modélisation de l’effet du tunnelier qu’il avait utilisé pour les phases no1 et 2.
L’examen des réponses a confirmé que c’est bien le couple [caractéristiques mécaniques du terrain ; procédure de modélisation du creusement au tunnelier] qui conditionne l’amplitude des déplacements induits. Avoir fixé le premier de ces deux points ne permet pas de réduire la dispersion entre les résultats. En effet, le tassement maximal du terrain est évalué entre 3 et 45 mm, et le tassement final du pieu est évalué entre 1 et 16 mm ( Fig. 10a) : la dispersion des résultats, pour les tassements, est au moins aussi grande que lors de la phase no1 « à modèle géotechnique libre ».
La grande dispersion des résultats obtenus est également illustrée par la distribution des efforts normaux dans le pieu après passage du tunnelier (Fig. 10b). L’effort de pointe final calculé est compris entre 0 et 80 % de la charge exercée en tête du pieu, pour un résultat expérimental de l’ordre de 20 %. À mi-profondeur du pieu, l’écart entre les modèles est encore plus grand : l’effort axial est compris entre 30 et 130 % de la charge en tête (contre 50 % expérimentalement). Cette dispersion des réponses en termes d’efforts axiaux finaux dans le pieu est du même ordre de grandeur que celle observée « à modèle géotechnique libre ».
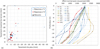 |
Fig. 10 Résultats des calculs à modèle géotechnique imposé (phase no3) : (a) Tassements du terrain et du pieu ; (b) Efforts axiaux dans le pieu après passage du tunnelier. Results of the geotechnical model calculations (phase no3): (a) Ground and pile settlements; (b) Axial forces in the pile after the passage of the TBM. |
6 Principaux enseignements
La qualité de l’expérimentation (en termes de données d’entrée et de mesures de la réponse du terrain et du pieu) et la large participation des acteurs des travaux souterrains à cet exercice permettent de tirer plusieurs enseignements concernant l’estimation de l’impact des tunneliers sur des fondations profondes.
Tout d’abord, la synthèse des différentes hypothèses effectuées par les participants a révélé une grande variété :
-
de types de modèles : bien qu’il s’agisse systématiquement de calculs par éléments finis ou différences finies, les participants ont répondu avec des modèles 3D complets, ou des modèles 2D en déformations planes du tunnel, combinés parfois à des calculs aux coefficients de réaction ;
-
de caractéristiques géotechniques attribuées au terrain (E50 variant d’un facteur six environ), bien que la majorité des participants (15/19) aient utilisé le même modèle de comportement (Hardening Soil Model) et que l’incertitude sur les données d’entrée ait été inférieure à celle rencontrée dans les projets courants ;
-
de manières de modéliser le creusement au tunnelier : huit approches différentes ont été utilisées, avec en particulier des différences importantes sur les conditions imposées le long du bouclier,
-
de représentation du pieu (modélisé selon les cas en 3D ou en 2D-déformations planes avec un « espacement fictif ») et de l’interface terrain / pieu (adhérence parfaite, frottement latéral constant ou fonction de la contrainte normale).
Concernant l’évaluation des efforts axiaux dans le pieu après chargement, la majorité des modèles numériques réalisés ont eu tendance à sur-estimer assez fortement l’effort de pointe, qui était quasiment nul expérimentalement. Ce constat est particulièrement vrai pour les modèles 2D en déformations planes, qui s’avèrent sur ce point nettement moins performants que les autres approches.
Pour les déplacements induits en surface du terrain « en champ libre », 50 % des modèles réalisés ont donné une estimation correcte de l’amplitude des tassements maximaux (10 ± 5 mm), mais certains modèles ont conduit à des valeurs extrêmes (3 à 50 mm).
Comme on pouvait l’attendre, la modification des paramètres de déformabilité des terrains (notamment le module sécant E50) permet de recaler l’amplitude du tassement maximal du terrain en surface. Par contraste, l’extension transversale de la cuvette de tassement est surestimée d’environ 50 %, en 3D comme en 2D, avec un modèle de comportement élastique parfaitement plastique de Mohr–Coulomb ou avec le Hardening Soil Model, et aucun recalage ne permet d’améliorer cet aspect du résultat sans modifier le modèle de comportement. Le modèle anisotrope transverse développé par Gilleron et al. (2021) permet de résoudre ce problème, mais il fait intervenir des paramètres supplémentaires dont la détermination n’est pas immédiate.
On peut aussi signaler que les modèles 3D ne se sont pas avérés nécessairement meilleurs que les modèles en déformations planes pour l’estimation des déplacements en surface en l’absence de pieu, et que la dispersion des résultats reste relativement limitée malgré la très grande variété des hypothèses de modélisation (déformabilité des terrain ou représentation du tunnelier). Chaque participant semble retenir un couple [modèle géotechnique ; procédé de modélisation du creusement au tunnelier] qu’il sait fiable « par expérience ». La forte dispersion des résultats observée lors de la phase no3 de l’exercice, où le modèle géotechnique a été imposé, en est révélatrice.
Pour le tassement final de la tête du pieu après passage du tunnelier, les points suivants sont à retenir. En premier lieu, les calculs présentent une grande dispersion : les résultats varient entre 0,5 et 10 fois le tassement réel du pieu. Estimer correctement le tassement du terrain « en champ libre » ne garantit pas nécessairement une bonne estimation du tassement du pieu. Encore faut-il que le modèle soit en mesure de reproduire fidèlement les phénomènes d’interaction sol/pieu se produisant tout le long du pieu.
Enfin, seuls six participants sur dix-neuf ont estimé correctement (i.e. dans un intervalle de ± 50 % par rapport aux résultats expérimentaux) les variations d’efforts axiaux induites par le tunnelier. Les autres modèles donnent des variations allant pratiquement de zéro à 300 % des variations mesurées expérimentalement. On peut signaler que la qualité de l’estimation des variations d’effort n’est pas corrélée avec la qualité de l’estimation des tassements du terrain, et que les modèles 2D en déformations planes ont tendance à sous-estimer les variations d’efforts axiaux.
Plus globalement, cet exercice a montré que l’estimation de l’impact d’un tunnelier sur des fondations profondes reste un sujet ouvert et que la diversité des approches utilisées conduit à une dispersion significative des résultats. L’amélioration des connaissances sur ce sujet est un problème important, afin de permettre une juste optimisation des projets de tunnels passant à proximité de fondations profondes (réduction des contraintes techniques, ou diminution des provisions financières pour risques identifiés).
Remerciements
Les auteurs remercient pour leurs contributions : (i) les acteurs de l’expérimentation en vraie grandeur : Eiffage Génie Civil, Cementys, Solétanche-Bachy et Egis-Tractebel, (ii) les participants à l’exercice de prévision : Amberg Engineering, AnteaGroup, Bouygues Travaux Publics, Eiffage Génie Civil, Egis, ERG Géotechnique, Fondouest, Geomod, Géotec, Isba TP, Itasca, Itec, Lombardi, Pini France, Setec-Terrasol, Systra, Socotec, Spie-Batignolles, Tractebel-Engie, Vinci Construction, Université de Liège.
Références
- AFTES GT16. 2018. Prise en compte des effets induits par le creusement sur les constructions avoisinantes dans la conception et la réalisation des ouvrages souterrains. Recommandation GT16 R2F1, 68 p. [Google Scholar]
- Aristaghes P, Autuori P. 2001. Calcul des tunnels au tunnelier. Rev Fr Geotech 97: 31–40. [CrossRef] [EDP Sciences] [Google Scholar]
- Basile F. 2014. Effects of tunnelling on pile foundations. Soils Found 54: 280–295. [CrossRef] [Google Scholar]
- Bel J. 2018. Modélisation physique de l’impact du creusement d’un tunnel par tunnelier à front pressurisé sur des fondations profondes. Thèse de doctorat, Université de Lyon. [Google Scholar]
- Berthoz N, Branque D, Subrin D. 2020. Déplacements induits par les tunneliers : rétro-analyse de chantiers en milieu urbain sur la base de calculs éléments finis en section courante. Rev Fr Geotech 164: 1–20. [CrossRef] [EDP Sciences] [Google Scholar]
- Chen L, Poulos HG, Loganathan N. 1999. Pile responses caused by tunnelling. J Geotech Geoenviron 125(3): 207–215. [CrossRef] [Google Scholar]
- Demagh R, Emeriault F, Hammoud F. 2013. 3D modelling of tunnel excavation using pressurized tunnel boring machine in overconsolidated soils. Stud Geotech Mech 35(2): 4–17. [Google Scholar]
- Dias D, Kastner R. 2013. Movements caused by the excavation of tunnels using face pressurized shields – Analysis of monitoring and numerical modeling results. Eng Geol 152: 17–25. [CrossRef] [Google Scholar]
- El Jirari S. 2021. Modélisation numérique du processus de creusement pressurisé des tunnels. Thèse de doctorat de l’Université de Lyon, 196 p. [Google Scholar]
- Finno RJ, Clough GW. 1985. Evaluation of soil response to epb shield tunnelling. J Geotech Eng 111: 155–173. [CrossRef] [Google Scholar]
- Franza A, Marshall AM, Haji T, Abdellatif AO, Carbonari S, Morici M. 2017. A simplified elastic analysis of tunnel-piled structure interaction. Tunnel Undergr Space Technol 61(1): 104–121. [CrossRef] [Google Scholar]
- Gilleron N, Bourgeois E, Chatellier P, Saïtta A. 2021. An anisotropic model for the numerical analysis of tunneling-induced settlements in the paris area. Geotech Geol Eng 39: 3133–3146. [CrossRef] [Google Scholar]
- Hong Y, Soomro MA, Ng CWW. 2015. Settlement and load transfer mechanism of pile group due to side-by-side twin tunnelling. Comput Geotech 64: 105–119. [CrossRef] [Google Scholar]
- Jacobsz SW, Standing JR, Mair RJ, Hagiwara T, Sugiyama T. 2004. Centrifuge modelling of tunnelling near driven piles. Soils Found 44(1): 49–56. [CrossRef] [Google Scholar]
- Jongpradist P, Kaewsri T, Sawatparnich A, et al. 2013. Development of tunneling influence zones for adjacent pile foundations by numerical analyses. Tunnel Undergr Space Technol 34: 96–109. [CrossRef] [Google Scholar]
- Kaalberg FJ, Teunissen EAH, van Tol AF, Bosch J. 2005. Dutch research on the impact of shield tunnelling on pile foundations. In: 5th International Symposium on Geotechnical Aspects of Underground Construction in Soft Ground, pp. 123–131. [Google Scholar]
- Karakus M, Ozsan A, Basarir H. 2007. Finite element analysis for the twin metro tunnel constructed in Ankara Clay, Turkey. Bull Eng Geol Environ 66: 71–79. [CrossRef] [Google Scholar]
- Komiya K, Soga K, Akagi H, Hagiwara T, Bolton MD. 1999. Finite element modelling of excavation and advancement processes of a shield-tunnelling machine. Soils Found 39(3): 37–52. [CrossRef] [Google Scholar]
- Liu C, Zhang Z, Richard AR. 2014. Pile and pile group response to tunnelling using a large diameter slurry shield – Case study in Shanghai. Comput Geotech 59: 21–43. [CrossRef] [Google Scholar]
- Loganathan N, Poulos HG, Stewart DP. 2000. Centrifuge model testing of tunnelling-induced ground and pile deformations. Geotechnique 50(3): 283–294. [CrossRef] [Google Scholar]
- Meschke G, Nagel F, Stascheit J. 2011. Computational simulation of mechanized tunneling as part of an integrated decision support platform. Int J Geomech 11: 519–528. [CrossRef] [Google Scholar]
- Meschke G, Ninic J, Stasheit J, Alsahly A. 2013. Parallelized computational modeling of pile-soil interactions in mechanized tunneling. Eng Struct 47: 35–44. [CrossRef] [Google Scholar]
- Michalski A, Branque D, Berthoz N, Mohamad W, Bourgeois E, Le Kouby A, Szymkiewicz F. 2022a. Full-scale experiment of the TBM / soil / pile interaction in Parisian subsoil. In: Actes du World Tunnel Congress, Copenhague, April 2022, 6 p. [Google Scholar]
- Michalski A, Branque D, Berthoz N, et al. 2022b. TBM soft ground interaction during EPB tunnelling in Parisian soil. Geotechnique (under review). [Google Scholar]
- Mohamad W, Bourgeois E, Le Kouby A, et al. 2022. Full scale study of pile response to EPBM tunnelling on a Grand Paris Express site. Tunnel Undergr Space Technol 124: 104492. [CrossRef] [Google Scholar]
- Mroueh H, Shahrour I. 2008. A simplified 3D model for tunnel construction using tunnel boring machines. Tunnel Undergr Space Technol 23: 38–45. [CrossRef] [Google Scholar]
- Nematollahi M, Dias D. 2019. Three-dimensional numerical simulation of pile-twin tunnels interaction – Case of the Shirazsubwayling. Tunnel Undergr Space Technol 86: 75–88. [CrossRef] [Google Scholar]
- Pang C, Yong K, Chow Y, Wang J. 2006. The response of pile foundations subjected to shield tunnelling. In: Geotechnical Aspects of Underground Construction in Soft Ground – Proceedings of the 5th International Conference of TC28 of the ISSMGE, pp. 737–743. [Google Scholar]
- Pardoen B, Levasseur S, Collin F. 2015. Using local second gradient model and shear strain localisation to model the excavation damaged zone in unsaturated claystone. Rock Mech Rock Eng 48: 691–714. [CrossRef] [Google Scholar]
- Rowe RK, Lo KY, Kack GJ. 1983. A method of estimating surface settlement above shallow tunnels constructed in soft ground. Can Geotech J 20: 11–22. [CrossRef] [Google Scholar]
- Schanz T, Vermeer PA, Bonnier PG. 1999. The hardening soil model: Formulation and verification. In: Beyond 2000 in Computational Geotechnics – 10 Years of PLAXIS, Proceedings of the 1st Symposium on Plaxis, CRC Press, 328 p. [Google Scholar]
- Schweiger HF. 2002, Results from numerical benchmark exercises in geotechnics. In: Proceedings of the 5th European Conference Numerical Methods in Geotechnical Engineering, Presses Ponts et Chaussées, Paris, pp. 305–314. [Google Scholar]
- Setec-Terrasol. 2022. Foxta v4 – Dimensionnement des fondations superficielles et profondes. Foxta v4 – Manuel en ligne sur www.terrasol.fr. [Google Scholar]
- Soomro MA, Hong W, Ng CWW, Lu H, Peng S. 2015. Load transfer mechanism in pile group dut to sing tunnel advancement in stiff clay. Tunnel Undergr Space Technol 45: 63–72. [CrossRef] [Google Scholar]
- Standing JR, Selemetas D. 2013. Greenfield ground response to EPBM tunnelling in London clay. Geotechnique 63(12): 989–1007. [CrossRef] [Google Scholar]
- Swoboda G. 1979. Finite element analysis of the New Austrian Tunnelling Method (NATM). In: Proceedings of the 3rd International conference on Numerical Methods in Geomechanics, vol. 2, Aachen, pp. 581–586. [Google Scholar]
- Swoboda G, Abu-Krisha A. 1999. Three-dimensional numerical modelling for TBM tunnelling in consolidated clay. Tunnel Undergr Space Technol 14: 327–333. [CrossRef] [Google Scholar]
- Vermeer PA, Brinkgreve R. 1993. Plaxis version 5 manual. Rotterdam: A.A. Balkema. [Google Scholar]
- Zhang Z, Huang M, Xu C, Jiang Y, Wang W. 2018. Simplified solution for tunnel-soil-pile interaction in Pasternak’s foundation. Tunnel Undergr Space Technol 78: 146–158. [CrossRef] [Google Scholar]
Citation de l’article : Nicolas Berthoz, Emmanuel Bourgeois, Denis Branque, Agathe Michalski, Wassim Mohamad, Alain Le Kouby, Fabien Szymkiewicz, Charles Kreziak. Impact du creusement au tunnelier sur un pieu : synthèse de l’exercice de prévision TULIP. Rev. Fr. Geotech. 2022, 173, 2.
Liste des tableaux
Synthèse des caractéristiques mécaniques mesurées.
Summary of measured mechanical characteristics.
Liste des figures
|
Fig. 1 Coupe transversale (TBM vu de face) (a) et vue aérienne (b) de l’expérimentation en vraie grandeur. Cross-section (front view of TBM) (a) and aerial view (b) of the full-scale experiment. |
| Dans le texte | |
|
Fig. 2 Synthèse des hypothèses effectuées en termes de déformabilité des terrains. Summary of assumptions made in terms of ground deformability. |
| Dans le texte | |
|
Fig. 3 Synthèse des procédés utilisés pour modéliser le processus de creusement au tunnelier. Summary of the processes used to model the tunneling process. |
| Dans le texte | |
|
Fig. 4 Efforts normaux dans le pieu après chargement (phase no1). Normal forces in the pile after loading (phase no1). |
| Dans le texte | |
|
Fig. 5 Tassements en surface du terrain « en champ libre » (phase no1) : (a) Tassement maximal en fonction du module des CSO ; (b) Tassement maximal en fonction du module des SB ; (c) Extension transversale de la cuvette de tassement ; (d) Tassements différentiels et niveau de dommage potentiel. Greenfield surface settlement (phase no1): (a) Maximum settlement as a function of the CSO modulus; (b) Maximum settlement as a function of the SB modulus; (c) Cross-sectional extension of the settlement basin; (d) Differential settlements and potential damage level. |
| Dans le texte | |
|
Fig. 6 Tassements de la tête du pieu en fonction du tassement maximal en surface du terrain (phase no1). Settlement of the pile head as a function of the maximum surface settlement of the ground (phase no1). |
| Dans le texte | |
|
Fig. 7 Efforts internes finaux dans le pieu, après passage du tunnelier : (a) Efforts normaux ; (b) Moments fléchissants transversaux (phase no1). Final internal forces in the pile, after passage of the TBM: (a) Normal forces; (b) Transverse bending moments (phase no1). |
| Dans le texte | |
|
Fig. 8 Effet du recalage des modèles vis-à-vis des tassements induits en surface du terrain. Effect of resetting the models with respect to induced ground surface settlements. |
| Dans le texte | |
|
Fig. 9 (a) Tassement de la tête du pieu post-creusement ; (b) Effort axial initial post-chargement et ; (c) Variation d’efforts axiaux induites par le passage du tunnelier (phase no2). (a) Post-tunneling pile head settlement; (b) Initial post-loading axial force and; (c) Variation of axial forces induced by the passage of the TBM (phase no2). |
| Dans le texte | |
|
Fig. 10 Résultats des calculs à modèle géotechnique imposé (phase no3) : (a) Tassements du terrain et du pieu ; (b) Efforts axiaux dans le pieu après passage du tunnelier. Results of the geotechnical model calculations (phase no3): (a) Ground and pile settlements; (b) Axial forces in the pile after the passage of the TBM. |
| Dans le texte | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.